A Flexible, Architected Soft Robotic Actuator for Linear, Servo-Driven Motion
A Flexible, Architected Soft Robotic Actuator for Linear, Servo-Driven Motion
NU 2024-095
INVENTORS
- Ryan Truby*
- Taekyoung Kim
SHORT DESCRIPTION
This technology introduces a flexible, architected soft robotic actuator designed for linear, servo-driven motion, offering enhanced adaptability and efficiency for various robotic applications.
BACKGROUND
Soft robotics has emerged as a transformative field, addressing the limitations of traditional rigid actuators with greater flexibility, adaptability, and safety. Despite progress, challenges persist in designing and manufacturing soft actuators that perform efficiently across diverse applications. Existing systems often struggle with bulkiness, low efficiency, and limited actuation speeds, prompting the need for innovative solutions that combine robustness with flexibility.
ABSTRACT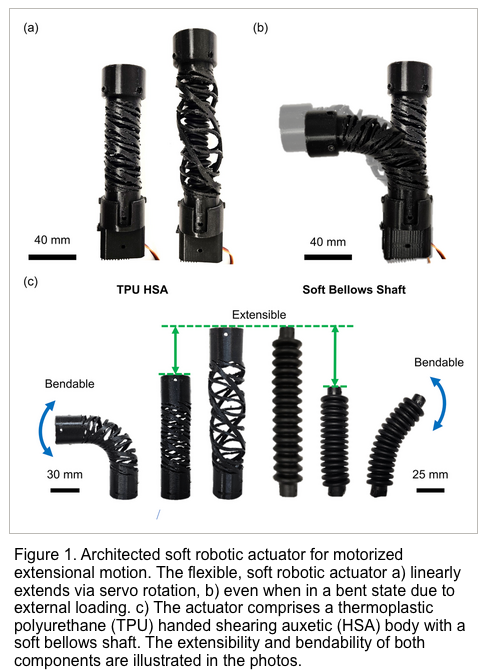
The invention presents an improved approach to electrically-driven soft actuators, featuring a 3D printed, cylindrical handed shearing auxetic (HSA) structure combined with a deformable rubber bellows shaft. This actuator design leverages torque from a servo motor to achieve linear extension, with the rubber bellows shaft transmitting torque while resisting torsional deflection. The actuator's high flexibility allows for adaptive extension even when bent, distinguishing it from traditional motorized soft actuators. This architected material design not only offers a compact form factor and ease of use but also provides a viable alternative to cable tendon mechanisms and series elastic actuators, enhancing the performance and application range of soft robotics.
APPLICATIONS
- Soft Robotics: Enhances the adaptability and functionality of soft robotic systems.
- Robotics: Provides a versatile actuator option for various robotic designs.
- Cobots: Enables safe and flexible operation in collaborative robotics.
- Manipulators: Improves precision and range of motion for robotic manipulators.
- Medical devices (e.g., catheters): Offers a flexible actuator solution for advanced medical applications.
ADVANTAGES
- Electrically driven actuation: Ensures efficient and precise actuator control.
- Cable-free actuation: Simplifies design and enhances mobility.
- Scalable: Allows for adaptation to various sizes and applications.
- Flexible, deformable, and compliant: Provides superior adaptability and safety in operation.
PUBLICATIONS
Ryan Truby et al, "A Flexible, Architected Soft Robotic Actuator for Motorized Extensional Motion", Advanced Intelligent Systems, First published: 08 July 2024.
IP STATUS
US Patent Pending.
Patent Information:
| Title |
App Type |
Country |
Serial No. |
Patent No. |
File Date |
Issued Date |
Expire Date |